
Calinon, S. and Billard, A. (2007)
Incremental Learning of Gestures by Imitation in a Humanoid Robot
In Proc. of the ACM/IEEE Intl Conf. on Human-Robot Interaction (HRI), Arlington, VA, USA, pp. 255-262.
Abstract
We present an approach to teach incrementally human gestures to a humanoid robot. The learning process consists of first projecting the movement data in a latent space and encoding the resulting signals in a Gaussian Mixture Model (GMM). We compare the performance of two incremental training procedures against a batch training procedure. Qualitative and quantitative evaluations are performed on data acquired from motion sensors attached to a human demonstrator and data acquired by kinesthetically demonstrating the task to the robot. We present experiments to show that these different modalities can be used to teach incrementally basketball officials' signals to a HOAP-3 humanoid robot.
Bibtex reference
@inproceedings{Calinon07HRI,
author = "S. Calinon and A. Billard",
title = "Incremental Learning of Gestures by Imitation in a Humanoid Robot",
booktitle = "Proceedings of the {ACM/IEEE} International Conference on Human-Robot Interaction ({HRI})",
year = "2007",
month="March",
location="Arlington, VA, USA",
pages="255--262"
}
Video
Final reproduction of communicative gestures used by Basketball officials, where the robot incrementally refines its motion through the user's support.
Source codes
Download
 Â
Download GMM incremental sourcecode
Â
Download GMM incremental sourcecode
Usage
Unzip the file and run 'demo1' or 'demo2' in Matlab.
References
- Calinon, S. and Billard, A. (2007) Incremental Learning of Gestures by Imitation in a Humanoid Robot. Proceedings of the ACM/IEEE International Conference on Human-Robot Interaction (HRI), pp. 255-262.
Demo 1 - Demonstration of an incremental learning process of Gaussian Mixture Model (GMM) using a direct update method
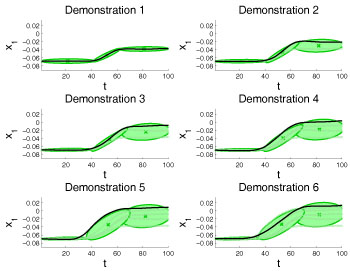
The demonstration loads a dataset consisting of several trajectories which are presented one-by-one to update the GMM parameters by using an incremental version of the Expectation-Maximization (EM) algorithm (direct update method). The learning mechanism only uses the latest observed trajectory to update the models (no historical data is used).
Demo 2 - Demonstration of an incremental learning process of Gaussian Mixture Model (GMM) using a generative method
The demonstration loads a dataset consisting of several trajectories which are presented one-by-one to update the GMM parameters by generating stochastically a new dataset from the current model, adding the new trajectory to this dataset and updating the GMM parameters using the resulting dataset, through a standard Expectation-Maximization (EM) algorithm (generative method). The learning mechanism only uses the latest observed trajectory to update the models (no historical data is used).