
Alizadeh, T., Calinon, S. and Caldwell, D.G. (2014)
Learning from demonstrations with partially observable task parameters
In Proc. of the IEEE Intl Conf. on Robotics and Automation (ICRA), Hong Kong, China, pp. 3309-3314.
Abstract
Robot learning from demonstrations requires the robot to learn and adapt movements to new situations, often characterized by position and orientation of objects or landmarks in the robot’s environment. In the task-parameterized Gaussian mixture model framework, the movements are considered to be modulated with respect to a set of candidate frames of reference (coordinate systems) attached to a set of objects in the robot workspace. Following a similar approach, this paper addresses the problem of having missing candidate frames during the demonstrations and reproductions, which can happen in various situations such as visual occlusion, sensor unavailability, or tasks with a variable number of descriptive features. We study this problem with a dust sweeping task in which the robot requires to consider a variable amount of dust areas to clean for each reproduction trial.
Bibtex reference
@inproceedings{Alizadeh14ICRA,
author="Alizadeh, T. and Calinon, S. and Caldwell, D. G.",
title="Learning from demonstrations with partially observable task parameters",
booktitle="Proc. {IEEE} Intl Conf. on Robotics and Automation ({ICRA})",
year="2014",
month="May-June",
address="Hong Kong, China",
pages="3309--3314"
}
Video
This video shows the experiment of a dust sweeping robot using a Programming by Demonstration (PbD) approach. The task is to sweep a set of uncleaned regions (depicted by red and blue cubes) using a broom which is attached to the end-effector of the robotic manipulator and collect the dust inside the dust pan. The task is demonstrated by the user 6 times with different positions and orientations of the dust pieces and the dust pan. Then, in the reproduction, the robot performs the task for a new situations in which one or both of the dust pieces are not available.
Each dust piece and the dust pan are considered as coordinate systems in a task-parameterized Gaussian mixture model, which modulates the movement of the broom. The proposed approach handles the cases in which there are missing task parameters during the demonstration or reproduction.
Source codes
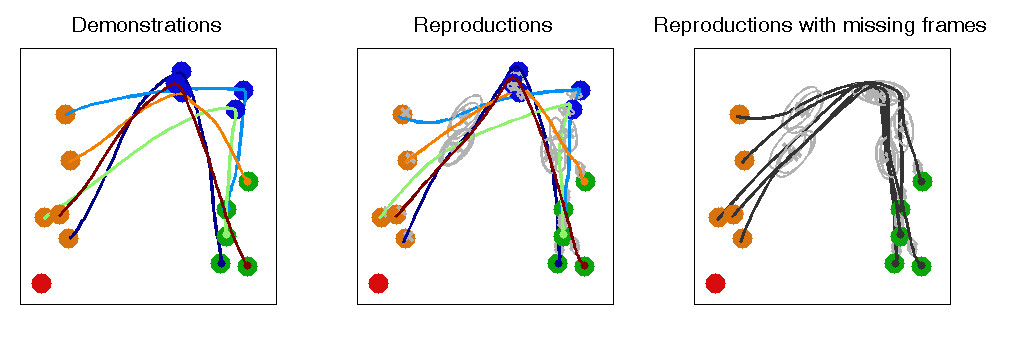
Demonstration a task-parameterized probabilistic model encoding movements in the form of virtual spring-damper systems acting in multiple frames of reference. Each candidate coordinate system observes a set of demonstrations from its own perspective. When one task parameter is not observable, the corresponding part in the data will be missing (third order sparse tensor data) and this information is taken into account in the learning and reproduction parts. The task is a via point passing task, starting from one point, passing through a second point and ending in a third point. A frame of references (task parameters) is attached to each via point, complemented by a fixed frame of reference at the origin.
Download
 Download task-parameterized tensor GMM with missing frames sourcecode
Download task-parameterized tensor GMM with missing frames sourcecode
Usage
Unzip the file and run 'demo1' in Matlab.
Reference
- Alizadeh, T., Calinon, S. and Caldwell, D.G. (2014) Learning from demonstrations with partially observable task parameters. Proc. IEEE Intl Conf. on Robotics and Automation (ICRA).