Pistillo, A., Calinon, S. and Caldwell, D.G. (2011)
Bilateral Physical Interaction with a Robot Manipulator through a Weighted Combination of Flow Fields
In Proc. of the IEEE/RSJ Intl Conference on Intelligent Robots and Systems (IROS), San Francisco, CA, USA, pp. 3047-3052.
Abstract
When collaboration between human users and robots involves physical interaction, the importance of the safety issue arises. We propose a method to transfer to robots several tasks demonstrated by the user through kinesthetic teaching and subsequently learned using a weighted combination of dynamical systems (DS). The approach used to encode the desired skills ensures a safe robot behavior during the task reproduction, allowing physical interaction with the user who can employ the manipulator as a tangible interface. By using a force sensor-less impedance controller with a back-drivable robot, this concept is exploited in two physical human-robot interaction (pHRI) scenarios. The first considers an emergency situation in which the user can stop or pause a task execution by grasping and moving the robot away from the region of space associated to the skill. The second studies the possibility to select one among several learned tasks and switch to its execution by physically guiding the robot towards the task region.
Bibtex reference
@inproceedings{Pistillo11IROS,
author="Pistillo, A. and Calinon, S. and Caldwell, D. G.",
title="Bilateral Physical Interaction with a Robot Manipulator through a Weighted Combination of Flow Fields",
booktitle="Proc. {IEEE/RSJ} Intl Conf. on Intelligent Robots and Systems ({IROS})",
year="2011",
month="September",
address="San Francisco, CA, USA",
pages="3047--3052"
}
Video
A Barrett WAM manipulator learns to reproduce movements to draw two characters "A" and "B" on a board.
The tasks are demonstrated by the user through kinesthetic teaching and learned using a weighted combination of dynamical systems. The weighting mechanism is a modified version of the classic GMM weighting procedure. The proposed weights allow physical interaction with the user, who can employ the manipulator as a tangible interface to influence its actions.
Two interactions are shown. The first considers an emergency situation in which the user can stop or pause the execution of task "A" by grasping and moving the robot away from the region of space associated to the skill. The second studies the possibility to select task "B" and switch to its execution by physically guiding the robot towards the task region, during the reproduction of task "A".
The robot shows a compliant and safe behavior during the interaction phases.
Source codes
Download
 Download Rescaled GMM sourcecode
Download Rescaled GMM sourcecode
Usage
Unzip the file and run 'demo1' in Matlab.
Reference
- Pistillo, A., Calinon, S. and Caldwell, D.G. (2011) Bilateral Physical Interaction with a Robot Manipulator through a Weighted Combination of Flow Fields. Proc. of the IEEE/RSJ Intl Conf. on Intelligent Robots and Systems (IROS).
Demo 1 - Simple example of Rescaled GMM
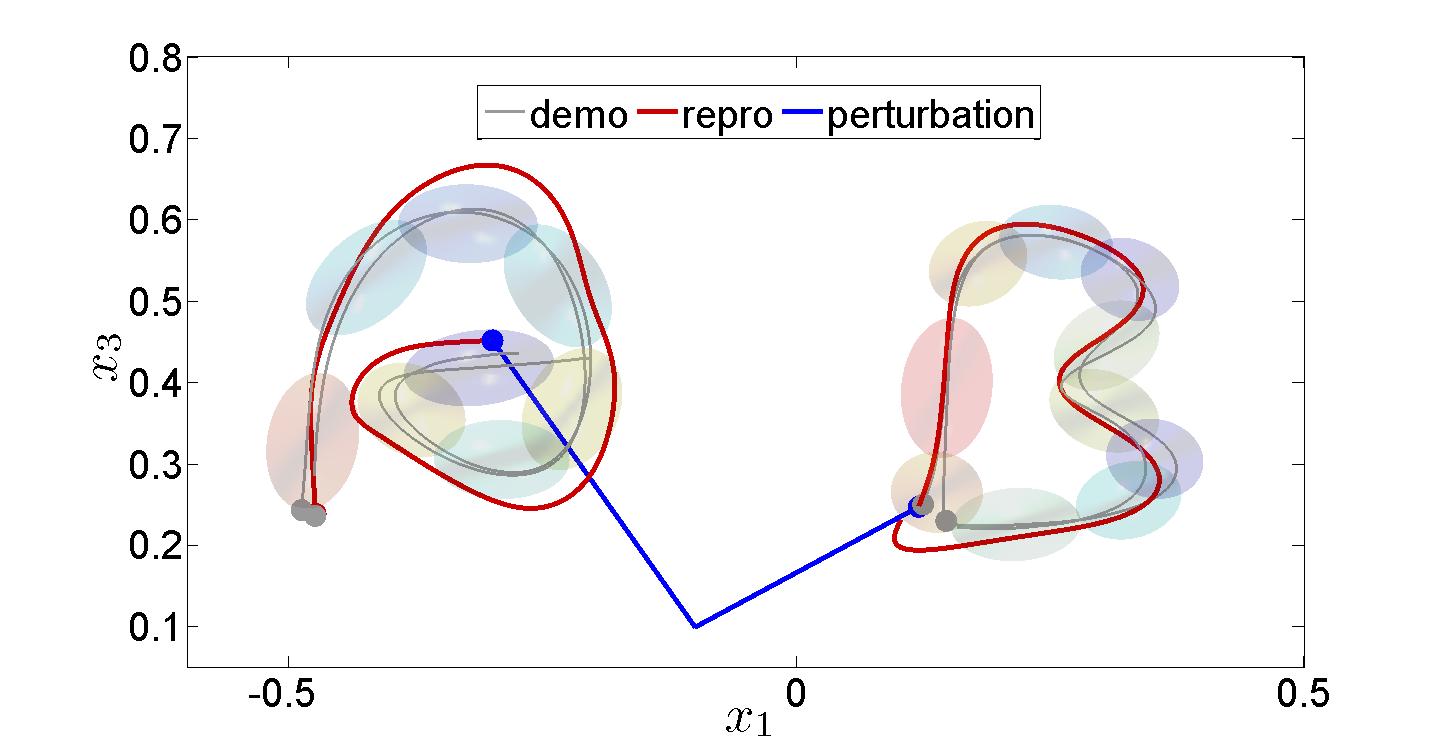
Simple example of using a Gaussian Mixture Models (GMMs) to learn and reproduce movements represented as a combination of linear
systems with a velocity command dx computed iteratively as dx = sum_i h_i (A_i x + b_i), where A_i and b_i form a matrix and vector associated with state i of the GMM.
The novelty here is that h_i is a weight originally defined by GMM and rescaled during reproduction to authorize motion commands only in the regions of the task demonstrations, while the movemement fades away outside those (according to the task constraints, that is, local variability).
With the new weighting mechanism, each linear subsystem becomes independent from the others.